自从诺贝尔奖得主扫描隧道显微镜(STM)的引入,以及Binnig、Quate和Gerber里程碑式的出版物中发明的原子力显微镜(AFM)以来,扫描探针显微镜领域的发展远远超出了利用原子间的力在纳米尺度上成像地形。测量分子间的作用力和观察原子的能力在科学上是诱人的。
单独的地形成像并不总是提供研究人员需要的答案,并且表面拓扑通常与材料特性不相关。由于这些原因,已经开发出高级的成像模式来提供各种表面的定量数据。现在,可以用AFM技术确定许多材料特性,包括摩擦,电力,电容,磁力,导电性,粘弹性,表面电位和电阻。
扫描隧道显微镜
扫描探针微观的发展开始于1981年STM的原版。GERD Binnig和Heinrich Rohrer在瑞士IBM苏黎世研究实验室工作时开发了第一个工作STM。该仪器稍后将在1986年获胜Binnig和Rohrer诺贝尔物理奖。
原子力显微镜
这原子力显微镜(AFM)被开发为克服STM的基本缺点 - 它只能是图像导电或半导体表面。AFM具有几乎任何类型的表面成像的优点,包括聚合物,陶瓷,复合材料,玻璃和生物样品。
Binnig,Requate和Gerber于1985年发明了AFM。他们的原始AFM由附有一条金箔条的钻石碎片组成。钻石尖端直接与表面接触,具有提供相互作用机制的内部范德瓦尔斯力。悬臂的垂直运动的检测是用第二尖端进行的 - 放置在悬臂上方的STM。
原子力显微镜如何工作
类似于扫描隧道显微镜的工作原理,使用反馈环路来调整成像表面所需的参数,对表面进行光栅扫描。与扫描隧道显微镜不同,原子力显微镜不需要导电样品。不是使用隧道效应的量子力学效应,原子力被用来描绘尖端-样品的相互作用。
通常被称为扫描探针显微镜(SPM),原子力显微镜技术用于几乎任何可测量的力相互作用-范德华,电,磁,热。对于一些更专业的技术,需要修改技巧和软件调整。
除了抗埃级定位和反馈回路控制之外,还有2个组件通常包括在原子力显微镜中:偏转和力测量。
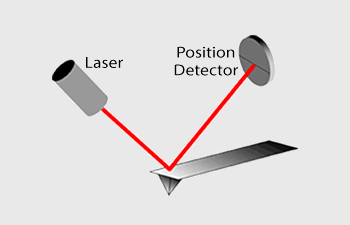
AFM探针挠度
传统上,大多数原子力显微镜使用激光束偏转系统,其中激光从反射AFM杠杆的背面反射到位置敏感的检测器上。AFM尖端和悬臂通常是微型的Si或Si3.N.4.。典型的尖端半径为几到10秒。
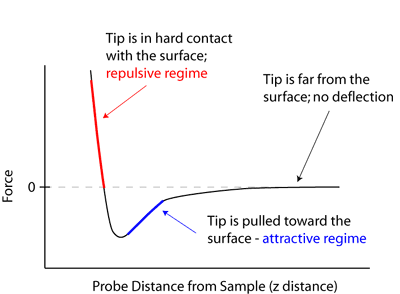
测量力量
因为原子力显微镜依赖于针尖和样品之间的力,这些力影响AFM成像。力不是直接测量的,而是通过测量杠杆的挠度来计算的,知道悬臂的刚度。
胡克的法律给出:
f = -kz.
F是力,k是杠杆的刚度,z是杠杆弯曲的距离。
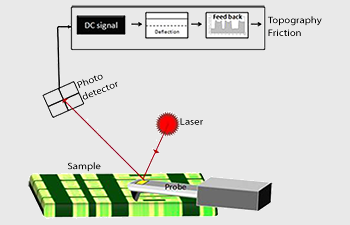
原子力显微镜的反馈回路
原子力显微镜具有使用激光偏转的反馈回路来控制力和尖端位置。如图所示,从包括AFM尖端的悬臂的背面反射激光。当尖端与表面相互作用时,光电探测器上的激光位置用于反馈回路中以跟踪表面以进行成像和测量。